


At the beginning of the last century, the first self-operated regulators were used for simple control tasks which marked the beginning of process automation. Many of us are not aware of the advantages, the design, the principle of operation as well as the limits of this type of technology. This article outlines how cost effective self-operated regulators can be.
Self-operated regulators are available for a wide range of applications. In everyday life we encounter radiator valves and gas pressure reducing valves in heating systems, temperature regulators for cooling water in automobiles, and pressure reducing valves in pneumatic systems regulating the supply pressure. In industry, self-operated regulators are used to solve simple pressure, differential pressure, flow or temperature control and safety tasks. They are also suitable for industrial supply networks using process media such as steam, water, oil, air or inert gases. For corrosive media or environments, self-operated regulators made of stainless steel are available. Explosion protection requirements are fulfilled without any additional measures and costs.
Self-operated regulators can often be used cost-effectively in applications where:
* Constant or rarely varying set points should be regulated.
* It is sufficient to maintain a constant controlled variable within tight limits.
* A limit value should be monitored.
Self-operated regulators are suitable for all those applications that do not require analog or digital control instruments equipped with or without bus communication systems because such control instruments involve:
* High initial investment costs.
* Time-consuming installation and start-up and hence lead to a certain amount of operating costs.
The cost-benefit ratio is often the reason for using cost-effective self-operated regulators. Cost reductions due to the use of self-operated regulators arise from:
* Short installation and start-up times.
* Operation requiring no auxiliary energy.
* The rugged design requiring little maintenance and ensuring a long service life.
* The possibility of regulating or protecting several variables with just one regulator.
Short installation and start-up times result from the simple design of these regulators and their easy operability. Often, only a regulator consisting of one component has to be installed. In this case, sensor, regulator and final control element are all integrated in one unit. Usually, self-operated regulators consist of two or maximum three components which are quick and easy to mount.
Mounting kits are available for a wide range of applications with steam pressure regulators. These kits enable the measured variable to be determined without any boring, welding or bending, and to be routed to the regulator's actuator via a condensation chamber.
Self-operated regulators can be started up easily. The set point needs to be adjusted at one point only, for instance, by changing just the spring compression. The installation of a strainer is recommended to protect the regulator from coarse impurities.
Operation without auxiliary energy means that the regulator requires neither power supply nor compressed air. Therefore, inexpensive emergency systems can be achieved using self-operated regulators. The operating costs are reduced by:
* Energy cost savings.
* Reduced or no maintenance downtime.
* The high reliability and the long service life of these regulators.
The energy required for the control task is supplied by the medium whose state is to be regulated or whose limit value is to be monitored (see Table 1).
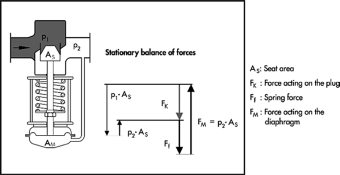
Positioning forces
Using the medium's pressure or the thermal properties of the medium, the sensor unit of the self-operated regulator builds up a pressure, for example, which produces the required positioning force acting upon the actuator diaphragm, or operating element. This force is usually balanced by the spring force determining the set point. In a pressure reducing valve, the positioning force (FM) is directly produced by the downstream pressure (p2) multiplied by the actuator area AM. (See Figures 1 and 2).
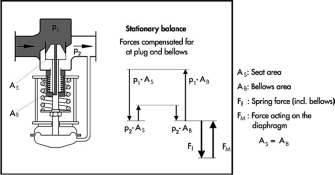
If the control valve is equipped with a plug which is pressure-balanced, for example, by a bellows, the set point is not influenced by the upstream pressure. The forces produced at the plug due to the pressure decrease are compensated for by the bellows and hence do not have any influence on the combined forces and the set point of the self-operated regulator.
Only the spring rates c (N/mm) of the set point spring and of the bellows cause the force opposing the actuator (and determining the set point) to change proportionally to the travel position of the plug. The regulator is a proportional controller.
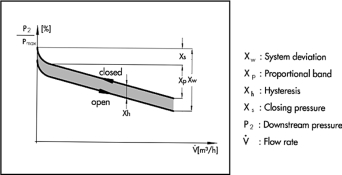
The proportional band xp and the proportional action coefficient Kp are determined by the diaphragm area A, the spring rate c and the rated travel. Within the proportional band, the actual value of the controlled variable continues to change the plug position until the actual force exerted by the diaphragm corresponds to the set point determined by the spring force. For reasons of simplicity, this control system does not take into account frictional forces which result in a low hysteresis. In general, self-operated regulators are only used up to a maximum of 70% of their KVS or CV value. At full load, however, the valve capacity should be a minimum of 20% for most applications. This causes pressure and differential pressure regulators to operate at an acceptable accuracy of approximately = ±5% system deviation related to the maximum adjustable set point while the dynamic control behaviour is good.

Worked example
A pressure reducing valve is to regulate the downstream pressure to 200 kPa, using its KVS value of 10 with KV = 7 only up to 70% for a setpoint range of 80 to 250 kPa. The band within which the downstream pressure is regulated for widely varying heat demands is calculated as follows:
ΔP = Pmax set point x 10/100 = 250 kPa x 0,10
ΔP = 25 kPa
If the operating point of the pressure reducing valve is set to 200 kPa at an average plant heat demand, the downstream pressure is 200 ±13 kPa in steady-state condition. At full load, the pressure is only 187 kPa and at almost zero consumption, it is 213 kPa. Since the hysteresis usually occurs only temporarily, it can be neglected. Should no heat be required, the pressure increases, for instance, to 225 kPa depending on the regulator.

The additional pressure difference between 225 and 213 kPa creates the closing force which causes the valve to close tightly. For higher demands and larger valve sizes, pilot-operated valves are used. When sizing self-operated regulators, the following maximum limits of the medium velocity related to the valve outlet must be observed:
* 1 to 2 m/s for liquids in building services.
* 3 m/s in industrial applications.
* 0,3 Mach for steam and gases.
A limit often applies for the kinematic viscosity: = 100 x 10-6 m2/s.
The valves should be mounted in horizontal pipelines with the measuring and control element suspended downwards, for the following reasons:
* In high-temperature applications, such a mounting position protects the measuring element, eg, the diaphragm actuator of a short regulator, against high temperatures.
* The frictional forces in the guide bearings are minimised.
* The hysteresis remains low.
* A longer service life of the packing is achieved.
The possibility of controlling or monitoring several variables with just one regulator leads to interesting and cost-efficient solutions. The largest signal always determines the plug position of the valve and, hence, the flow rate. Even different physical variables, such as pressure and temperature, can be controlled or monitored by connecting several measuring and control elements to the control valve, forming a modular designed control valve. Costs reductions are had as investment costs are low and installation times are short.

A solenoid release mechanism can be connected to a safety interlock circuit. In the modular designed regulator, the solenoid releases a spring mechanism which closes valves up to a size of max. DN 250. Versions up to DN 400 can also be implemented. Additional limit switches are used to transmit the status of the spring mechanism.
Conclusion
Self-operated regulators are suitable for supply networks and nearly any other process. If small set point deviations can be tolerated, these cost-effective regulators are quite suitable. If self-operated regulators are sized properly, trouble-free operation is virtually certain for many years.
About the author, and Samson
Wolfgang Hesse was born in 1958 and has been working at Samson AG for 20 years. During his first nine years, he was involved in the development of self operated regulators. Then he became a member of the Technical Sales Department. Today, he is a chief engineer and in charge of the product department of self-operated regulators which can be used in almost any process.
Samson is a leading manufacturer in instrumentation and process control engineering as well as in automation technology. The company is represented worldwide by 41 independent subsidiaries and 56 engineering and sales offices.
Samson produces control valves in accordance with the industrial standards of DIN, ANSI and JIS. Its control valves are available in all commonly used materials with pneumatic, electric or electro-hydraulic actuators. Samson also produces self-operated regulators for simple control systems whose reference variable remains constant. Complex transmitters, controllers and automated systems are also part of Samson's product line.


© Technews Publishing (Pty) Ltd | All Rights Reserved
 printer friendly version
printer friendly version